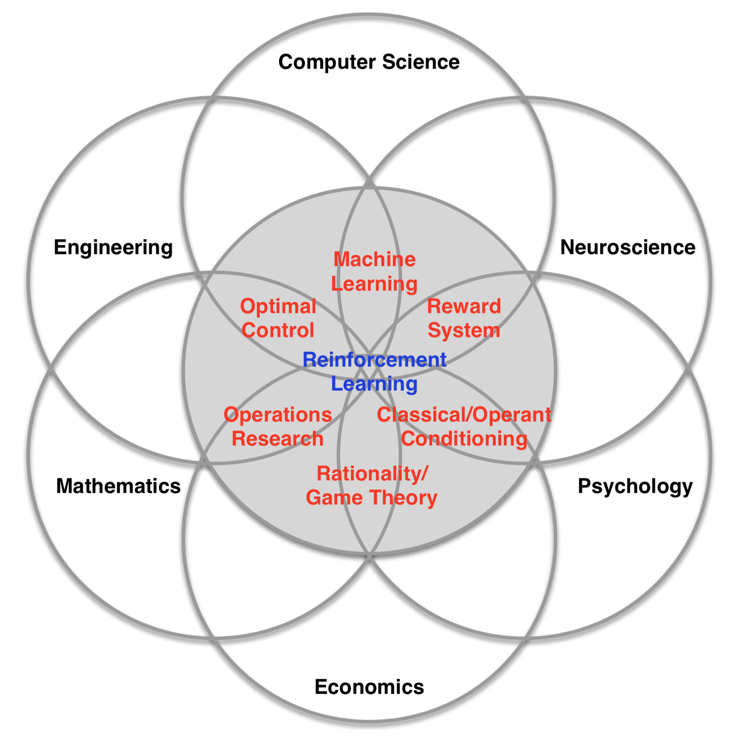
Reinforcement Learning
UMaine COS 470/570 – Introduction to AI
Spring 2019
Created: 2019-04-23 Tue 13:56
Why reinforcement learning?
Why reinforcement learning?
- Supervised learning: need labeled examples
- Unsupervised learning: maybe learn structure, but…
- Often:
- Do not have labeled examples
- Have to do something – i.e., make some decision – before training is complete
- But have some feedback about how agent is doing
Framing the problem
- Reinforcement of agent’s actions via rewards
- Current state → choose action → new state + reward
- Let \(R(s)\) = reward for state s
- Many states may have 0 reward: \[s_0 \to a_1 \to s_1 \to a_2 \to \cdots a_n \to s_n\] \[R(s_0)=R(s_1)=\cdots R(s_{n-1})=0\]
- E.g., games
- Instance of credit assignment problem
- Instance of sequential decision problem
Reinforcement learning
- Rewards
- But no a priori knowledge of rewards, model (transition function)
- E.g.:
- Given an unfamiliar board and pieces, alternate moves with opponent – only feedback is “you win” or “you lose”
- Robot has to move around campus delivering mail, but doesn’t know anything about campus, or delivering mail, or people, or…feedback: “good robot”, “ouch!”, falls over, etc.
Reinforcement learning
Learning approaches
- Learn utilities of states
- Use to select action to maximize expected outcome utility
- Needs model of environment, though to know \(s'\) resulting from taking action \(a\) in \(s\)
- Policy learning (reflex agent):
- Directly learn \(\pi(s)\): which action to take in \(s\), bypassing \(U(s)\)
- Q-learning:
- Learn an action-utility function Q
- \(Q(a,s)\) is the value (utility) of action \(a\) in state \(s\)
- Model-less learning
Learning approaches
- Passive learning:
- Policy is fixed
- Task: learn \(U(s)\) (or utility of state-action pairs)
- Maybe learn model
- Active learning:
- Has to learn what to do
- May not even know what its actions do
- Involves exploration
Passive reinforcement learning
Passive reinforcement learning
- Policy \(\pi(s)\) is fixed
- Task: See how good policy is by learning: \[ U^\pi(s) =E\left[ \sum_{t=0}^\infty \gamma^t R(s_t) \right] \]
- Doesn’t know:
- transition model \(P(s'|s,a)\)
- reward function \(R(s)\)
- Approach:
- Do series of trials
- Each: start at start, follow policy to terminal state
- Percepts ⇒ new state \(s'\), \(R(s')\)
- Stochastic transitions ⇒ different histories from same \(\pi\)
Direct estimation of \(U^\pi(s)\)
- Woodrow & Huff (1960 – adaptive control theory
- \(U(s)\) = remaining reward = reward-to-go
- View: each trial ⇒ one sample of reward-to-go for each visited state
- Reduces reinforcement learning to supervised learning
- But although \(R(s)\) and \(R(s')\) are independent…
- …\(U(s)\) and \(U(s')\) are not independent – (cf. Bellman equation)
- Misses opportunities for learning – e.g.,
- See \(s_1\) for first time, it leads to known state \(s_2\) that is known
- Bellman: \(U(s_2)\) tells us something about \(U(s_1)\)
- Direct estimation: only \(R(s1)\) matters
- Hypothesis space > needs to be
Adaptive dynamic programming
- First learn model of transition function \(P(s'|s,a)\) from trials
- Now you have an MDP
- Solve it as per sequential decision process
- Could use Bayesian approaches to make this better (see R&N, 21.2.2)
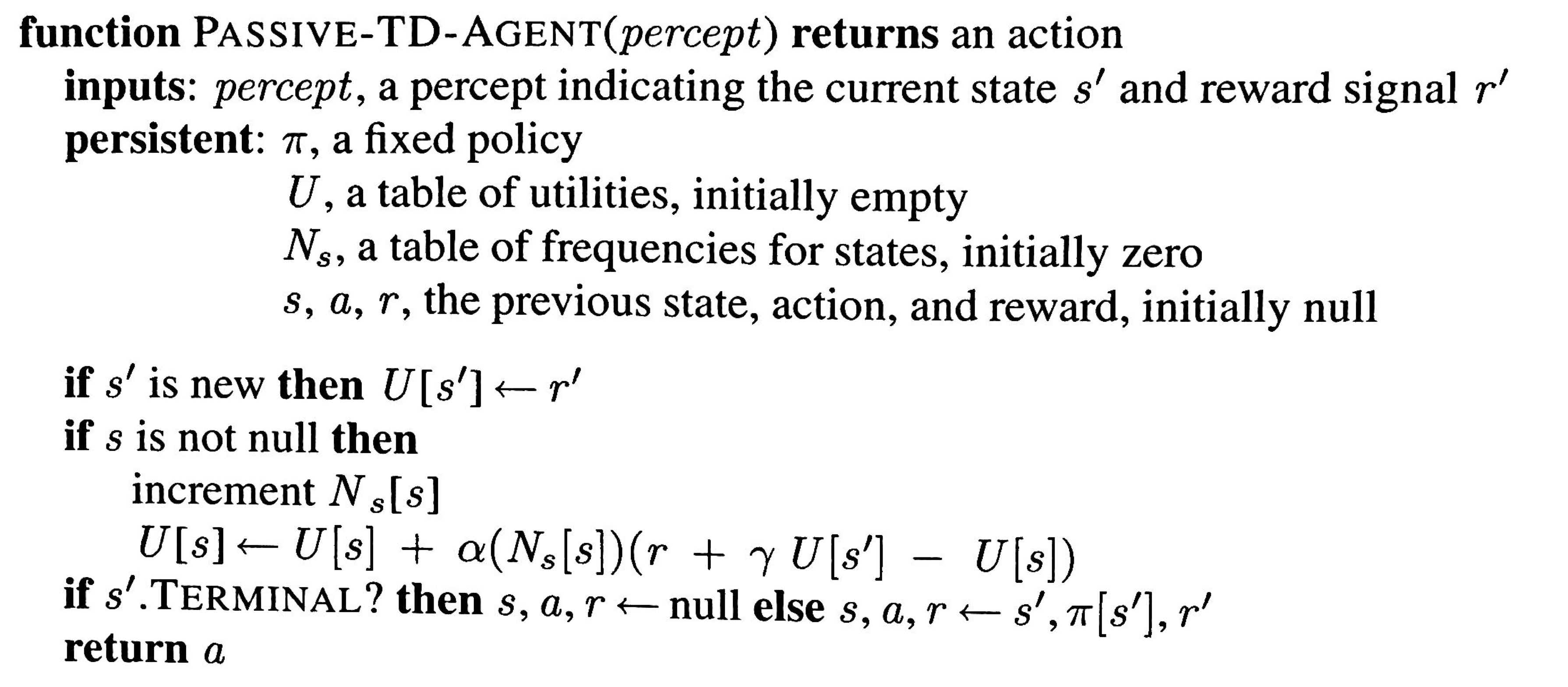
Temporal difference learning
- Use the Bellman equations directly: \[ U^\pi(s) = R(s) + \gamma\sum_s' (P(s'|s, \pi(s))U^\pi(s') \]
- General idea:
- Start with no known \(U(\cdot)\)
- Iterate:
- Take step \(\pi(s)\) to give \(s'\)
- If \(s'\) is unknown state, use \(R(s')\) as \(U(s')\)
- Use \(U(s')\) to adjust \(U(s)\) : \[U^\pi(s) \leftarrow U^\pi(s) + \alpha(R(s) + \gamma U^\pi(s') - U^\pi(s))\]
Temporal difference RL algorithm
Active reinforcement learning
Active reinforcement learning
What if we not only don’t know:
- \(P(s'|s,a)\)
- \(R(s)\)
…also don’t know \(\pi(s)\)?
- One approach: use passive learning, but for all possible actions
- Use the adaptive dynamic programming agent, but for all \(a\in A(s)\) at each state
- This gives the transition model
- Use value iteration or policy iteration ⇒ \(U(s)\)
- Produces greedy agent:
- Once good terminal state found, tends to keep using policy that found it
- Seldom in practice converges to optimal policy \(\pi^*\)!
Greedy agent
- Why doesn’t greedy agent converge?
- Only exploits known path – assumes model is good
- But model created based on learned \(\pi\) – leaves some states unexplored
- Actions leading to those states allow better learning of model
- Which allows better estimation of \(U(s)\), \(\pi^*\)
- Have to balance exploitation with exploration
Incorporating exploration
- Using value iteration to get \(U(s)\)
- Now think of \(U^+(s)\), the optimistic estimate of utility of \(s\)
- Design an exploration function \(f(u,n)\) where:
- \(u\) - expected utility of some new state \(s'\)
- \(n\) - number of times action \(a\) (expected to lead to \(s'\) from \(s\)) has been tried in \(s\)
- New iteration function for (optimistic) utility: \[U^+(s) \leftarrow R(s) + \gamma \max_a f\left(\sum_{s'} P(s'|s,a)U^+(s'), N(s,a)\right)\] where \(N(s,a) =\) number of times \(s\) has been tried in \(a\)
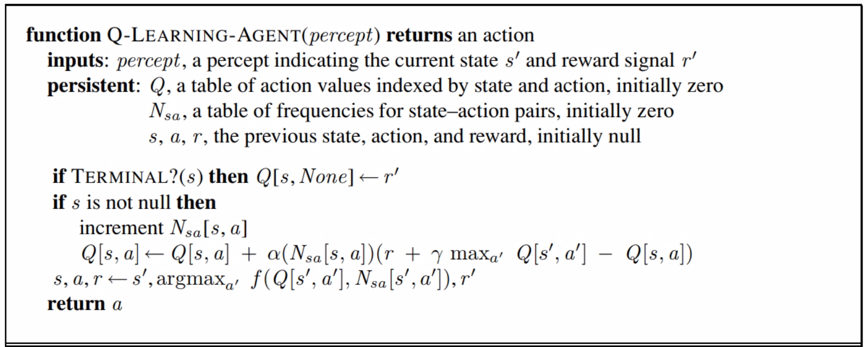
Q-learning
- Instead of learning utilities, learn \(Q(s,a)\): utility of action \(a\) in \(s\)
- Model-free: doesn’t have to know \(U(s)\) at all
- Could do this:
\[Q(s,a) = R(s) + \gamma \sum_{s'} P(s'|s,a)\max_{a'}Q(s',a')\]
- A Bellman equation, but for \(
- Could use in adaptive dynamic programming as iteration method
- But this isn’t really model-free – need \(P(s'|s,a)\)
- A Bellman equation, but for \(
- Instead, use temporal difference method: \[Q(s,a) \leftarrow Q(s,a) + \alpha(R(s) + \gamma\max_{a'}Q(s', a') - Q(s,a)\]
Q-learning agent
SARSA
- State-action-reward-state-action (SARSA) - similar to Q-learning \[Q(s,a) \leftarrow Q(s,a) + \alpha(R(s) + \gamma Q(s',a') - Q(s,a)\]
- Here, \(a'\) is action actually taken in \(s'\)
- Q-learning: uses best action from \(s'\)
- Still model-free, but have some policy that leads to choosing \(a'\)
- Off-policy vs on-policy algorithms
- Off-policy algorithms pay no attention to any policy \(\pi\) – e.g., Q-learning
- On-policy: actions with respect to some policy
- Off-policy more flexible…
- …but if policy is constrained by others (e.g.), may be better to go with realistic actions taken rather than best possible
So…Q-learning or model-learning?
- R&N: “This is an issue at the foundations of artificial intelligence.”
- More generally: do we need models to behave intelligently, or not?
- Traditionally: model (most symbolic AI)
- Lately: model-free (e.g., neural networks)
Generalized RL
Generalized RL
- So far:
- Learn \(U(s)\)
- Learn \(Q(s,a)\)
- But what if state space is very large or infinite?
- Instead: Learn function approximating \(U(s)\) or \(Q(s,a)\) – \(\widehat{U}(s)\) or \(\widehat{Q}(s,a)\)
- E.g., approximate \(U(s)\) by linear combination of features
- Static eval for chess, etc.
- \(\widehat{U}(s) = \theta_1 f_1(s) + \cdots \theta_n f_n(s)\)
- Just learn \(\theta_i\) values
- For chess, \(> 10^{40}\) states – now only learn \(n\) values, where \(n <\!< 10^{40}\)
- Not just save space: allows generalization
- On the other hand: maybe we choose wrong hypothesis space
Generalized RL
- So – how to approach?
- One way:
- Choose utility approximator
- Run a series of trials
- Find best fit of feature weights to data (min. squared error)
- ⇒ Supervised learning
Generalized RL
- Better to use online algorithm for RL
- Estimate \(\widehat{U}(s)\) (random to start)
- Run trial
- Adjust $\widehat{U(s)} accordingly
- How to adjust?
- Compute gradient with respect to each parameter
- Move parameter down gradient
- Sound familiar?
Generalized RL: Delta rule
- Widrow-Hoff rule (delta rule)
- For trial \(j\), observed utility \(u_j(s)\), and parameters \(\theta\), let error:
\begin{eqnarray*}
Ej(s) &=& (\widehat{U}θ(s) - uj(s))2/2
∇ Eθi &= & ∂ Ej/∂θi
θi &←& θi - α\frac{\partial E_j(s)}{\partial \theta_i}
&←& θi + α(uj(s) - \widehat{U}θ(s) ) \frac{∂ \widehat{U}θ(s)}{∂ θi} - The \(\theta\) parameters can also be the weights in a neural network!
Deep reinforcement learning
Deep reinforcement learning
- In RL, we can learn:
- \(U(s)\)
- \(Q(s,a)\)
- \(\pi(s)\)
- In generalized RL: learn parameters \(\theta\) of functions approximating \(U\), \(Q\), \(\pi\)
- Inputs: percepts
- Outputs: actions
- Have to know form of function (hypothesis space)
- Deep learning: excels in learning nonlinear functions mapping inputs to outputs
- Maybe combine RL and DL ⇒ deep reinforcement learning
Model learning
- Need to learn \(U(s)\), \(P(s'|s,a)\)
- Either/both can be learned by DL
- DL is responsible for understanding what the state s is given percepts
- E.g., for \(U(s)\):
- Weights \(\theta\)
- Many trials
- Each trial: \[\theta\leftarrow \arg\!\min_\theta \frac{1}{2} \sum_i ||U_\theta^\pi(s_i) - y_i ||^2\]
- Compute \(y\) the target value via Monte Carlo method
- Using policy, go from \(s\) to end to find utility
- Average multiple trials
- Or use Bellman equation, with temporal difference
- Now, however: don’t store \(U(s)\) – adjust the NN’s weights
Deep Q-learning
- Can we use deep learning to do model-free Q-learning?
- Deep Q-network (DQN):
- Function approximating \(Q(s,a)\): \(Q(s,a;\theta)\)
- Here, \(\theta\) are the parameters: the weights of NN
- Problem: Can’t just treat as supervised learning problem
- Q-learning isn’t stable w/ DL
- Q-learning balances exploitation with exploration
- ⇒ Input space, actions – changing as we explore more
- As these change, target value for \(Q\) changes
- So net’s input space, output space changing rapidly as explore
DQN
- Train by minimizing sequence of loss functions: \[L_i(\theta_i) = E\left[(y_i-Q(s,a; \theta_i))^2 \right]\] where \(y_i\) is the target: \[y_i = E\left[r+\gamma\max_{a'} Q(s',a'; \theta_{i-1})|s,a\right]\]
- \(s\) here is a sequence of states here (so not Markovian?)
- Expected value for \(L\) based on probability function over sequences of states
- Target determined from emulator/world + previous \(\theta\)
- Optimize loss function \(L_i(\theta_i)\) with parameters from previous iteration \(\theta_{i-1}\) held fixed
- Target depends on weights – not like supervised learning
- Gradient \[\nabla_{\theta_i} L_i(\theta_i) = E\left[(r+\gamma Q(s',a';\theta_{i-1}) - Q(s,a; \theta_i)\nabla_{\theta_i} Q(s,a;\theta_i)\right]\]
- Use stochastic gradient descent
DQN
- As implemented by Mnih et al. (2013) at DeepMind
- Use past experience, past weights to slow down changes in input, output space
- Allows gradual learning of \(Q\)
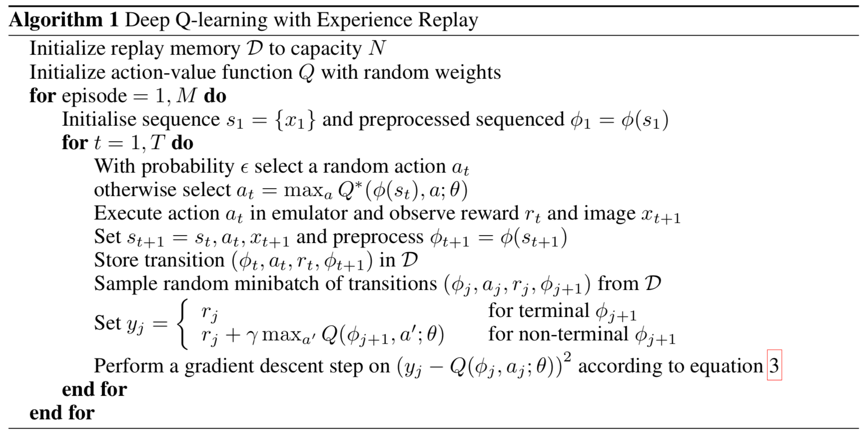
- Experience replay:
- Keep last million or so <\(s,a,r\)> in replay buffer
- Train using batches from here
- Target network:
- Use two networks
- Update one constantly
- Other (target net): synchronize with other occasionally
- Target network provides \(Q\) values instead of using the rapidly-changing one
- So: \(Q\) from old weights trains new weights, then new becomes old occasionally
DQN algorithm
DQN results
- DeepMind’s early work:Atari games
- Played most better than any other RL program, some better than humans
- Input: raw frames (201 × 160 pixels, 128 colors)
- Output: actions
- Pre-processing: convert to grayscale, downsample + crop to rough game area
- Convolutional neural network
- First layer: 16 8 × 8 filters, stride 4, ReLu
- Second layer: 32 4 × 4 filters, stride 2, ReLu
- Last hidden layer: fully-connected, 256 ReLu units
- Output: Fully connected linear layer, single output per valid action
Example: ConvNetJS
Double DQN
- Q-learning problem: can be overly optimistic on value of \(Q\) due to approximation error
- Update function for Q-learning \[\theta_{t+1} = \theta_t + \alpha(Y_t - Q(s_t, a_t; \theta_t))\nabla_{\theta_t} Q(s_t, a_t; \theta_t)\] where: \[Y_t \equiv R(s_{t+1}) + \gamma \max_a Q(s_{t+1}, a; \theta_t)\]
- For DQN: \[Y_t \equiv R(s_{t+1}) + \gamma\max_a Q(s_{t+1},a,\theta^{-}_t)\]
- \(\max_a\) portion: target weights select and evaluate best action it would take
- May not be action that online net selects ⇒ possible overestimate
Double DQN
- Best if “best action” is one online net would choose…
- …but estimated target is per target net
- ⇒ Double DQN target: \[Y_t \equiv R(s_{t+1} + \gamma Q(s_{t+1}, \arg\!\max_a Q(s_{t+1},a; \theta_t); \theta^{-}_t)\]
- Much better learning due to fewer overestimates
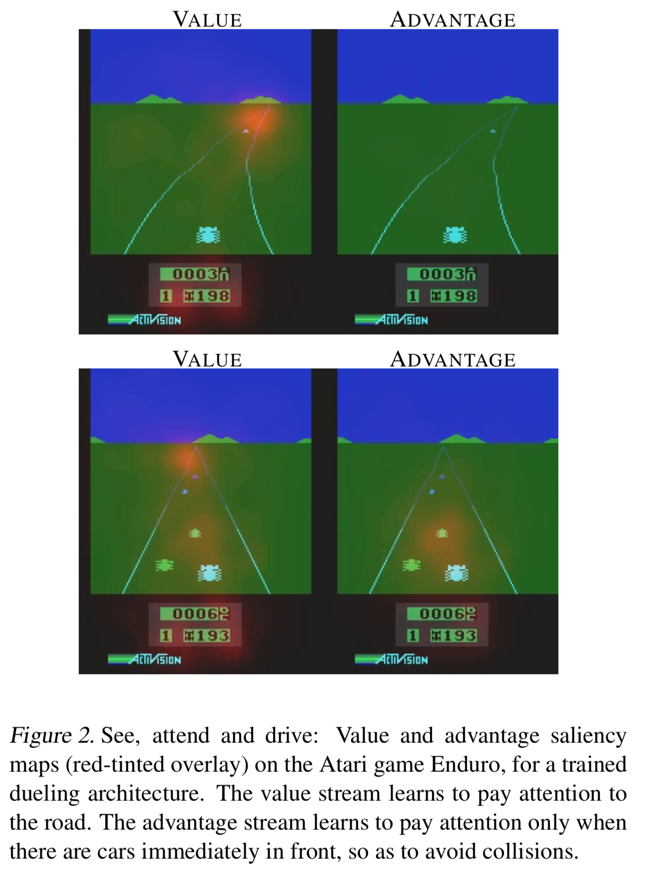
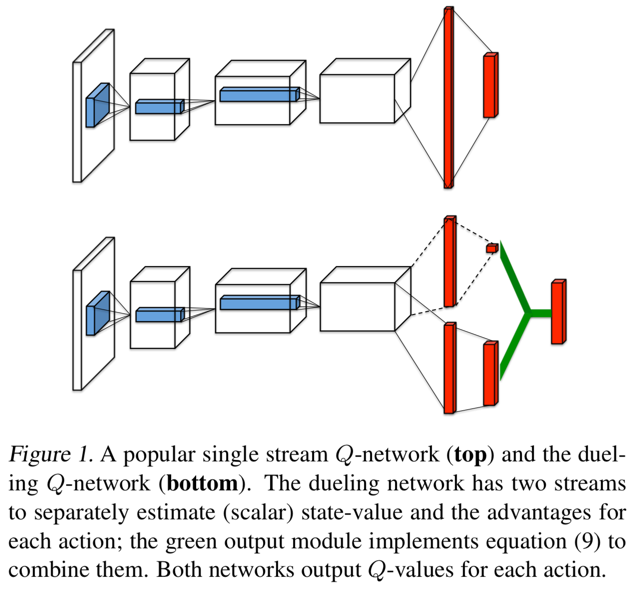
Dueling DQN
- Sometimes:
- No action is necessary in a state; or
- It doesn’t matter much which action is done; or
- One action is better than another in a range of states.
- \(Q(s,a)\) conflates assessing states and assessing values (as would \(U(S)\), then picking action)
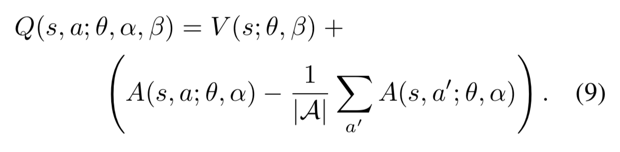
- What if split \(Q(s,a) = V(s) + A(s,a)\)
- Value of state \(s\) \(V(s)\) is basically \(U(s)\)
- Advantage of action \(a\) in state \(s\) \(A(s,a)\) is state-dependent action worth
Dueling DQN
Learn \(V(S)\) and \(A(s,a)\) separately, then recombine to give \(Q(s,a)\):
Dueling DQN
Dueling DQN advantage
- Learn values of states when actions don’t matter
Don’t worry about choosing an action when it doesn’t matter